BITCOIN MINING ROBOT


Project Background
This quarter's theme was a play on the popular internet game, BitCoin. Our class was tasked with programming a BitBot to find a mining station to acquire coins, followed by depositing particular numbers of coins in three different stations to receive a prize. The BitBot must do so in under 2 minutes/faster than its opponent robot, or else suffer the consequences!
To read more: http://me210kukaracha.weebly.com
VIDEO DOCUMENTATION
Beacon Sensing
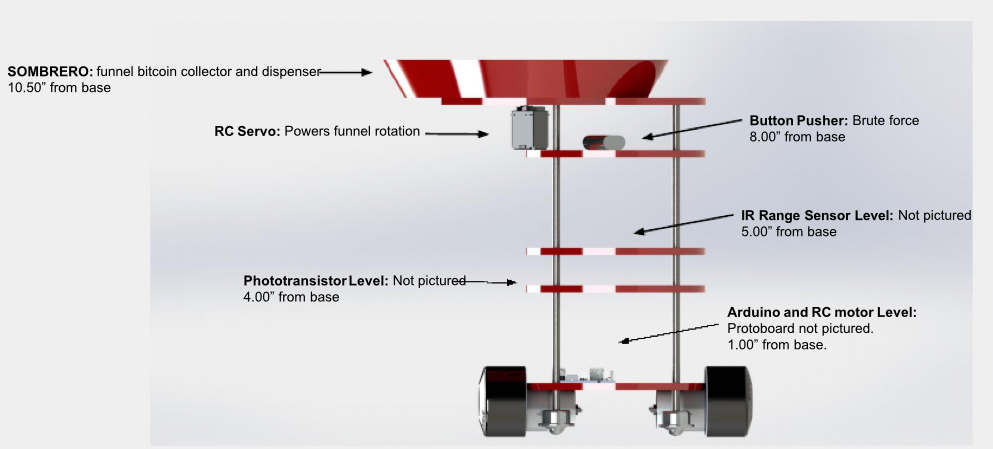
The team implemented 3 phototransistors in order to help locate and determine which side of the playing field the robot is on, as well as, to align the robot with the bitcoin mine and exchanges. The location of these phototransistors are on the South, East, and West sides of the robot. Scopes were added to South and West sides in order to more accurately determine the location of the mine and exchanges for alignment purposes.
Tape Sensing
The team implemented two tape sensors into our robot to know when our robot crossed the tape for the Mine and the South Tape sensor to know when our robot had gotten close enough to the Exchanges.
Proximity Sensing
The team utilized 5 IR proximity sensors in order to determine distances from the walls of the field and to ensure that the robot was parallel to a specified wall for specific functions. The two South sensors were used to become parallel to the starting wall so that the robot could determine which side it was on and be sure that it was in a position to move straight away from the start wall.
Encoders
In order for our strategy for the game to work, it was necessary that the robot could move forward or backwards straight. We also needed precise 90 degree rotations. During our testing, it became clear that we needed a way to know how far off the wheels were from each other and know how much each wheel had rotated. We implemented encoders on each wheel with 30 degree increment paper wheels glued to the inside of the wheels. Tape sensors were taped (blue) to the motor platform directed towards the encoder paper wheels. This proved to be helpful, though not nearly as precise as needed in order to ensure straight movement or precise turns.