Hippogriff Robot



This robot was created by a four person team for a Mechanical Systems Design class. The design requirements were that it had to walk one meter in less than 15 seconds, walk up a 10 degree incline, look like a hippogriff (half horse/half eagle), and flap its wings. Read the full report HERE.
PROCESS
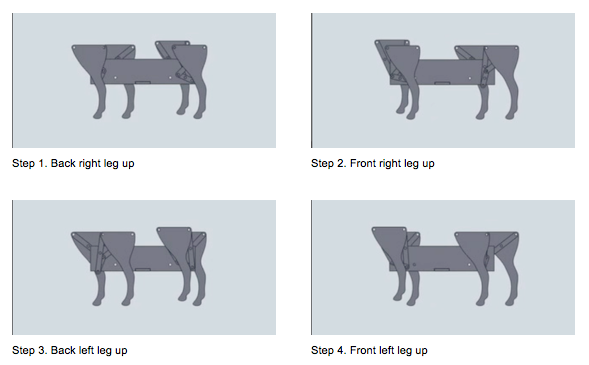
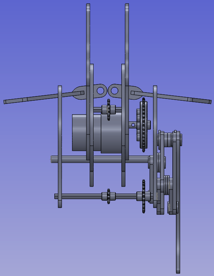
The robot was made from lasercut masonite and its six bar linkages were determined by using matlab to optimize the contact time.